(Difficulté : * facile)
Nous
proposons ici la réalisation d'une table de Poncet ou table
équatoriale pour notre télescope Dobson Strock 250
:
Principe
:
Rappelons qu'une table équatoriale doit être placée sous le télescope et
que son plateau supérieur tourne selon un axe // à l'axe terrestre et à la
même vitesse.
Il faut évidemment aligner la table avant de l'utiliser...
Ainsi, tous les instruments posés sur la table suivent parfaitement les
objets du ciel (à part la Lune qui a son mouvement propre).
Si on pointe Arcturus ou Saturne, il n'y a donc pas besoin de toucher le
télescope : l'objet observé reste centré dans l'oculaire.
Évidemment l'amplitude de la rotation de la table est limitée.
Ici, nous l'avons conçu pour un angle de +- 8° ce qui correspond à,
environ 1h 05 mn.
On cale la table en butée Est, on pointe le télescope et on observe : le
moteur pas à pas de la table (en micropas) tourne à une vitesse parfaitement régulière
et entraîne le télescope vers l'Ouest.
Au bout de un peu plus de 1 h ou après avoir pointé un nouvel objet, la
table arrive en butée Ouest et ne peut plus tourner : on allège le
télescope, on le remet en butée Est et c'est reparti...
A noter que nous voyons beaucoup de systèmes de suivi équatorial à base de
moteur à courant continu.
Nous ne croyons pas à cette solution, même avec un potentiomètre
multitours...
La vitesse d'un moteur à courant continu dépend trop de la tension, de la
charge, de la température, de l'âge du capitaine...
La solution que nous proposons ici n'est guère plus chère, un petit peu
plus embêtante à régler au départ mais après, ça ne bouge plus !
Nous utiliserons exactement la même électronique que notre Motorisation
d'une monture équatoriale :
.
Notons qu'avec cette électronique, le moteur pas à pas est alimenté pas
des amplificateurs Audio LM386 montés en pont. Le moteur reçoit environ 5
V et le LM386 délivre un peu moins de 1 A. La vitesse de rotation du
moteur est très lente l'inductance est négligeable. Pour un couple et un
rendement maximum, la résistance du moteur doit être de l'ordre de 5 ohms.
Un peu plus de préférence : 7 ohms par exemple.
Étude :
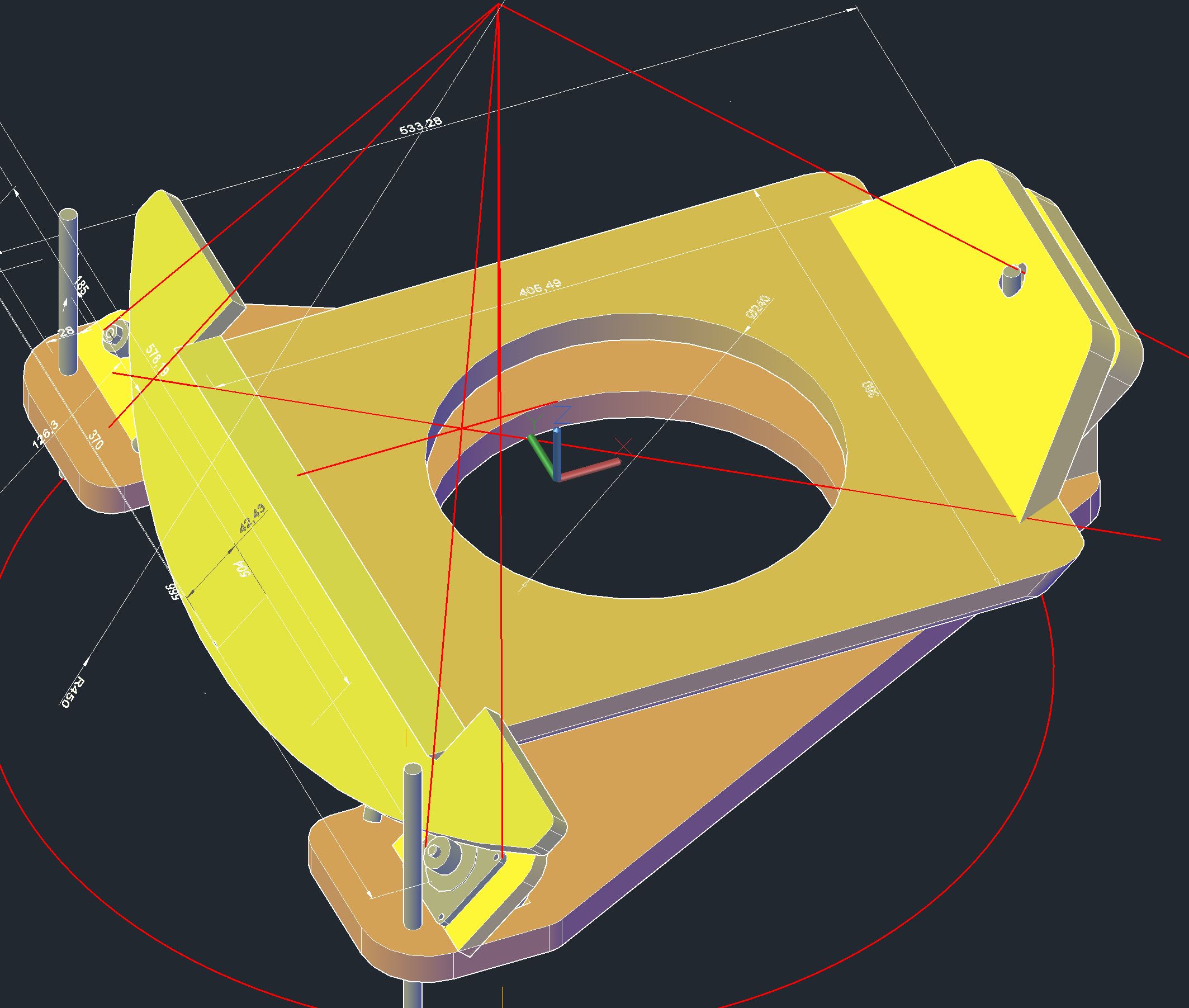
Voici notre table en 3D :
Nous rappelons que l'axe de la table équatoriale doit approximativement
passer par le centre de gravité du télescope.
.
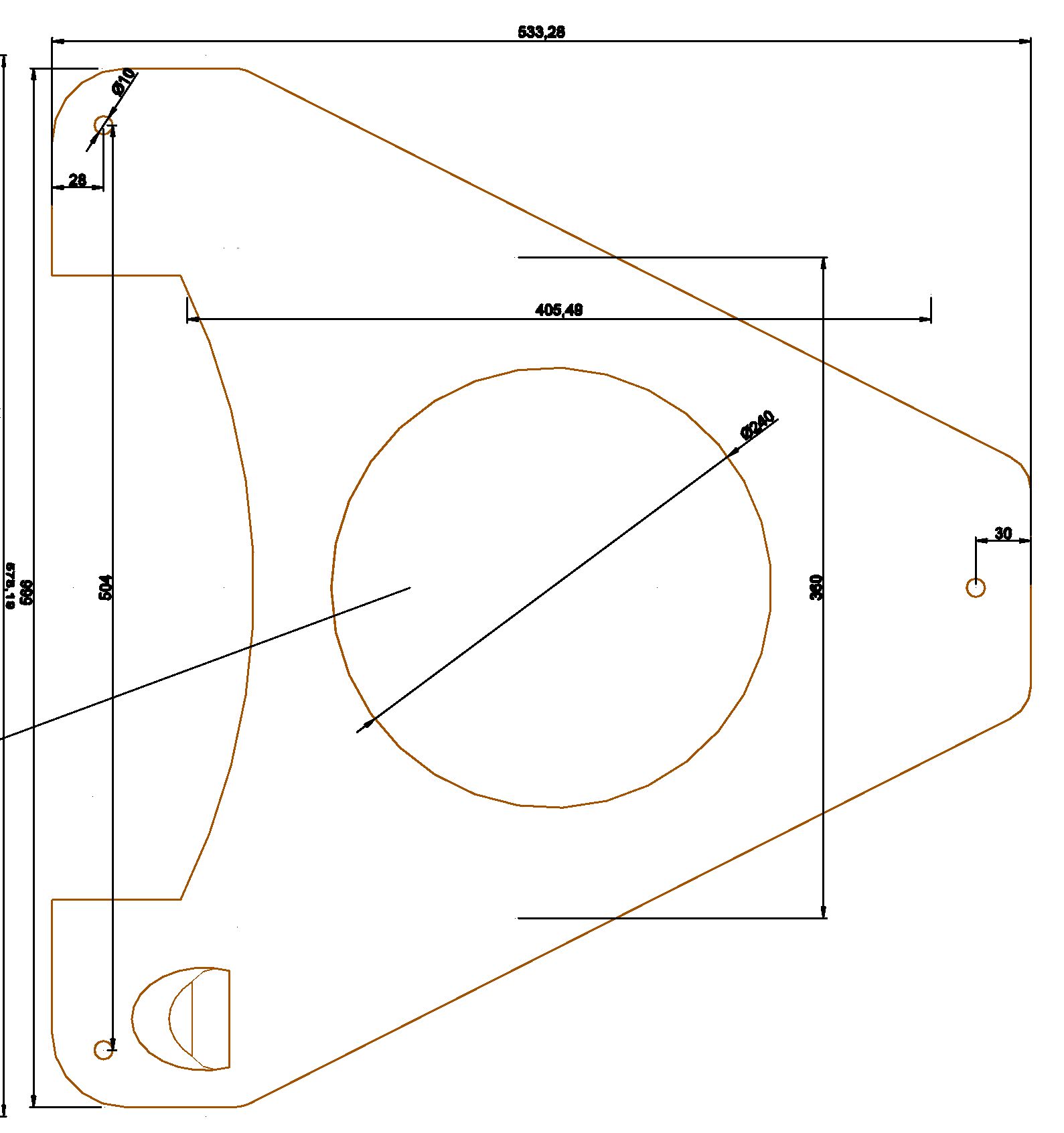
Le support avec ses dimensions :
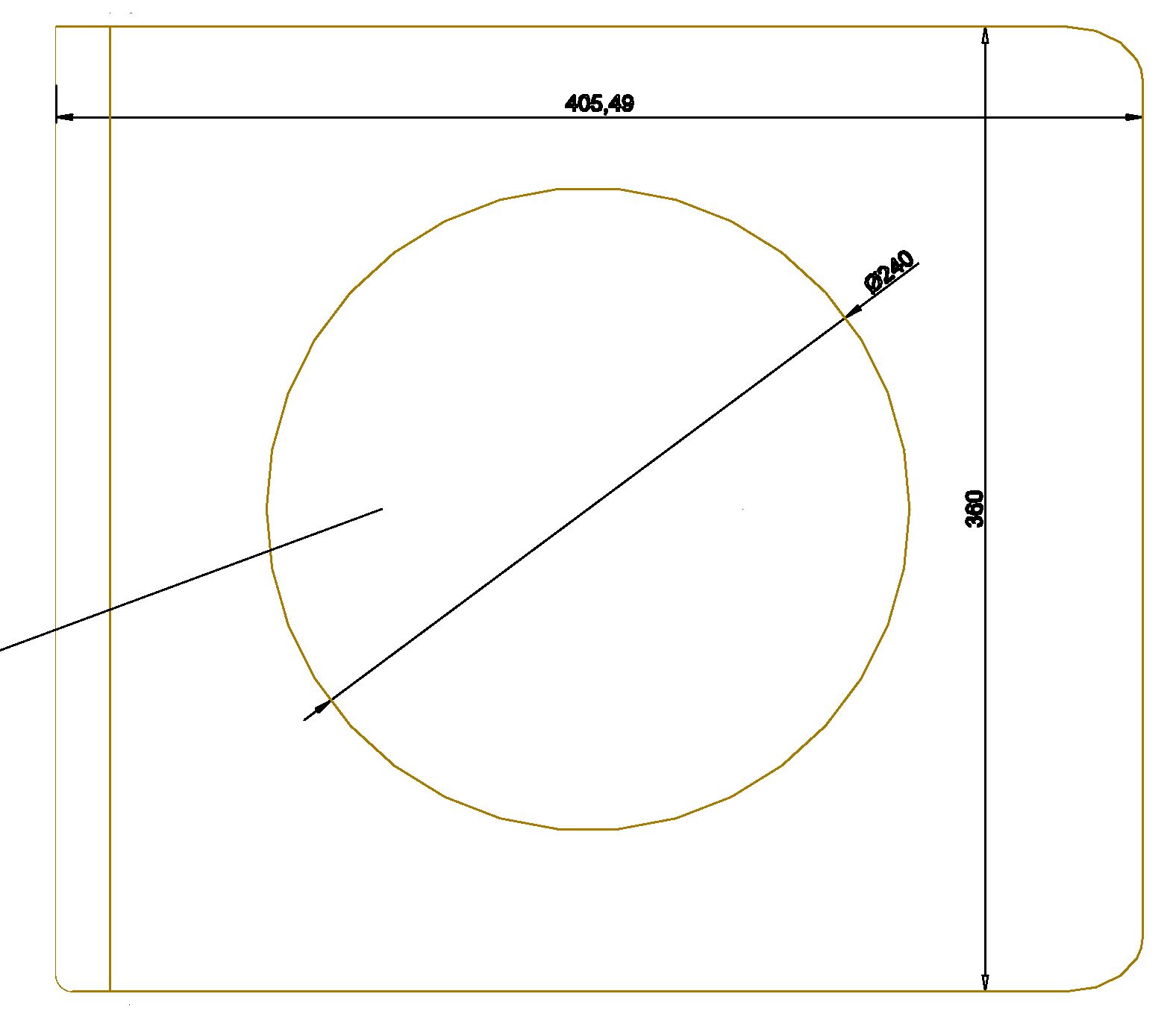
Le plateau mobile :
Le secteur cylindrique :
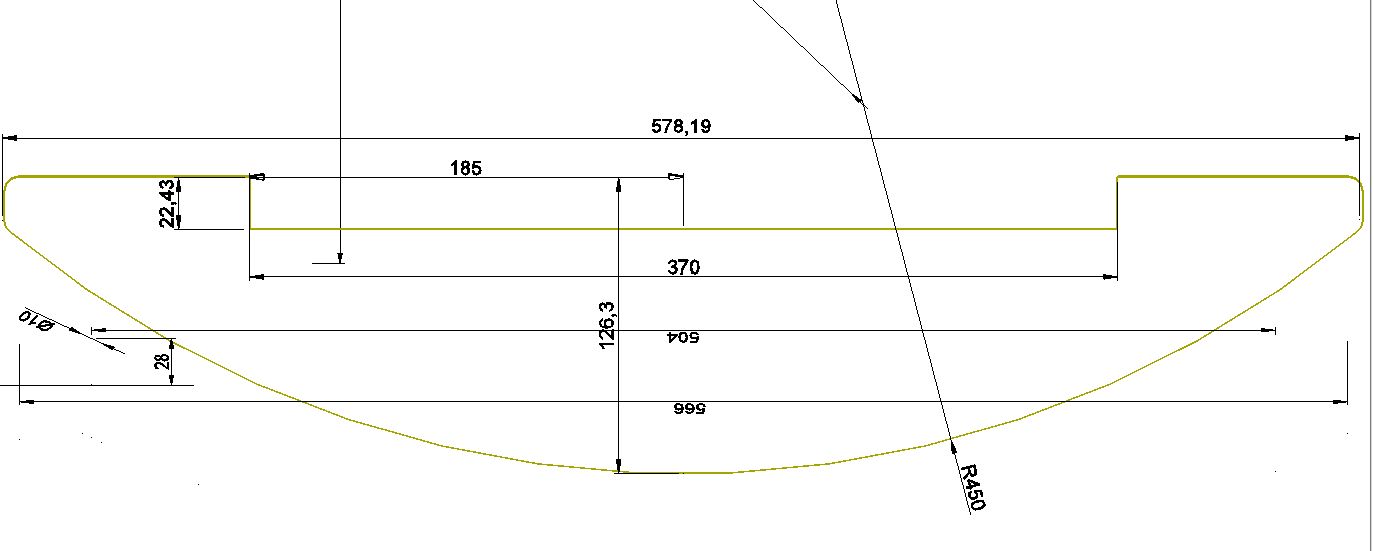
.
Réalisation du patron en carton
:
Pour
se fixer les idées et malgré la 3D, nous avons décidé de fabriquer une
maquette échelle 1 en carton.
La maquette permet aussi de juger la rigidité
et d'optimiser les renforts et les découpes.
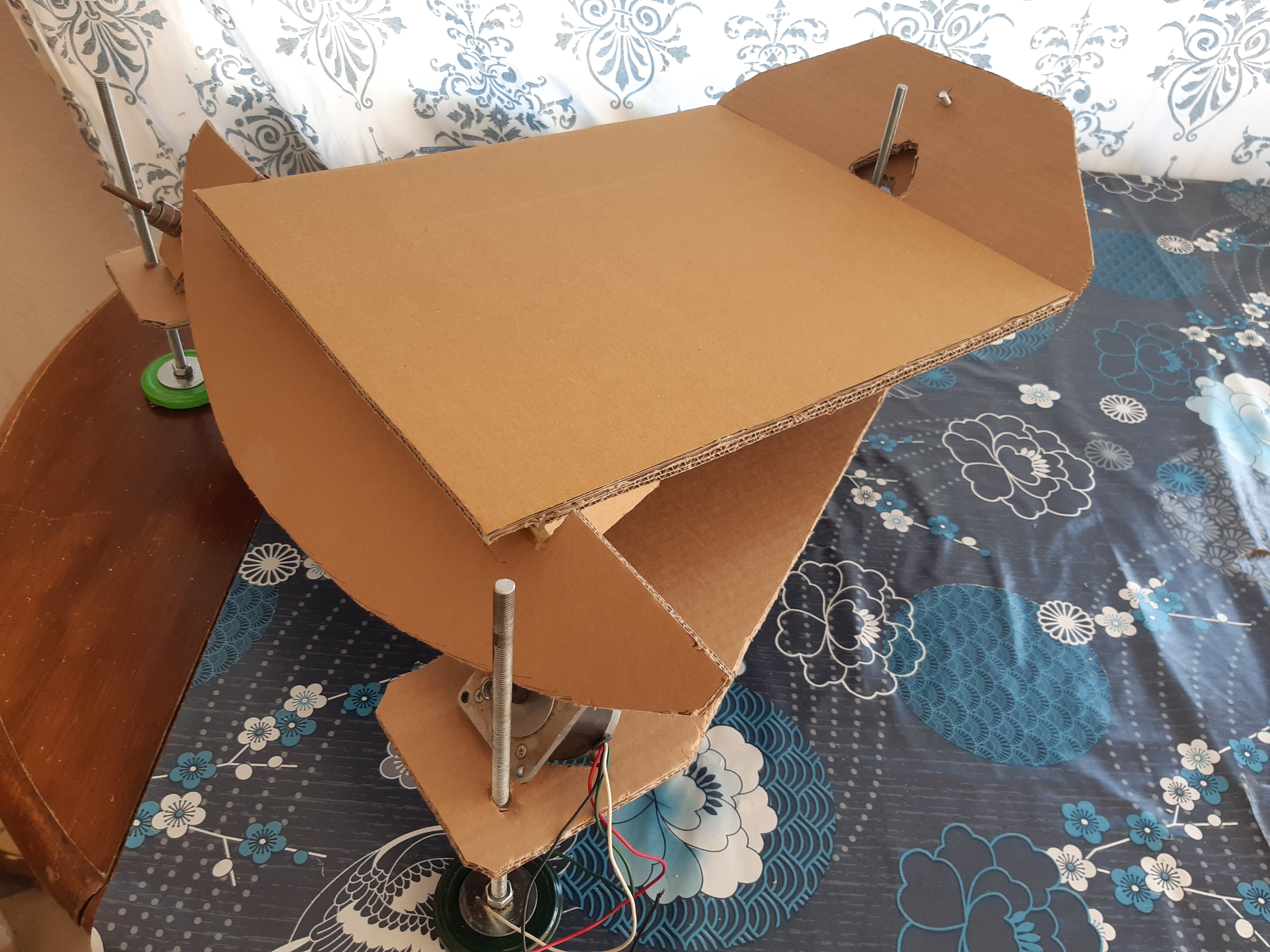
Le support et la partie mobile vus de dessus
:

.
Le support et la partie mobile avec ses
renforts vus de dessous : (Les pieds sont réalisés avec une tige filetée
M8 et des couvercles de conserve remplis de colle à chaud).
Dans la version définitive les écrous des
pieds seront "sertis" et collés dans le dessous du CTP du support.
Les pieds gardent une certaine souplesse lors
du réglage de hauteur des tiges filetées.

.
La table complète :
Le support Est est réalisé avec une vis
M6, rondelle, rondelle, écrou, 3 roulements à billes, rondelle, écrou
montés sur une plaque de CTP collée par 2 renforts CTP à 45°.
Le support Ouest est un cylindre
aluminium monté sur l'axe d'un moteur pas à pas et muni d'une gaine
thermorétractable (Durée de vie de la gaine thermo ???)
Dans la version définitive en CTP, le
moteur pas à pas sera fixé sur une plaque de CTP avec 2 renforts CTP à
45°.
Le support Sud est réalisé avec une vis
écrou M6 fixée sur la partie mobile et un roulement à billes dans la
partie fixe. Un jeu de rondelles permet de caler la position de la
partie mobile.
Les
tiges filetées des pieds seront probablement recoupées...
.
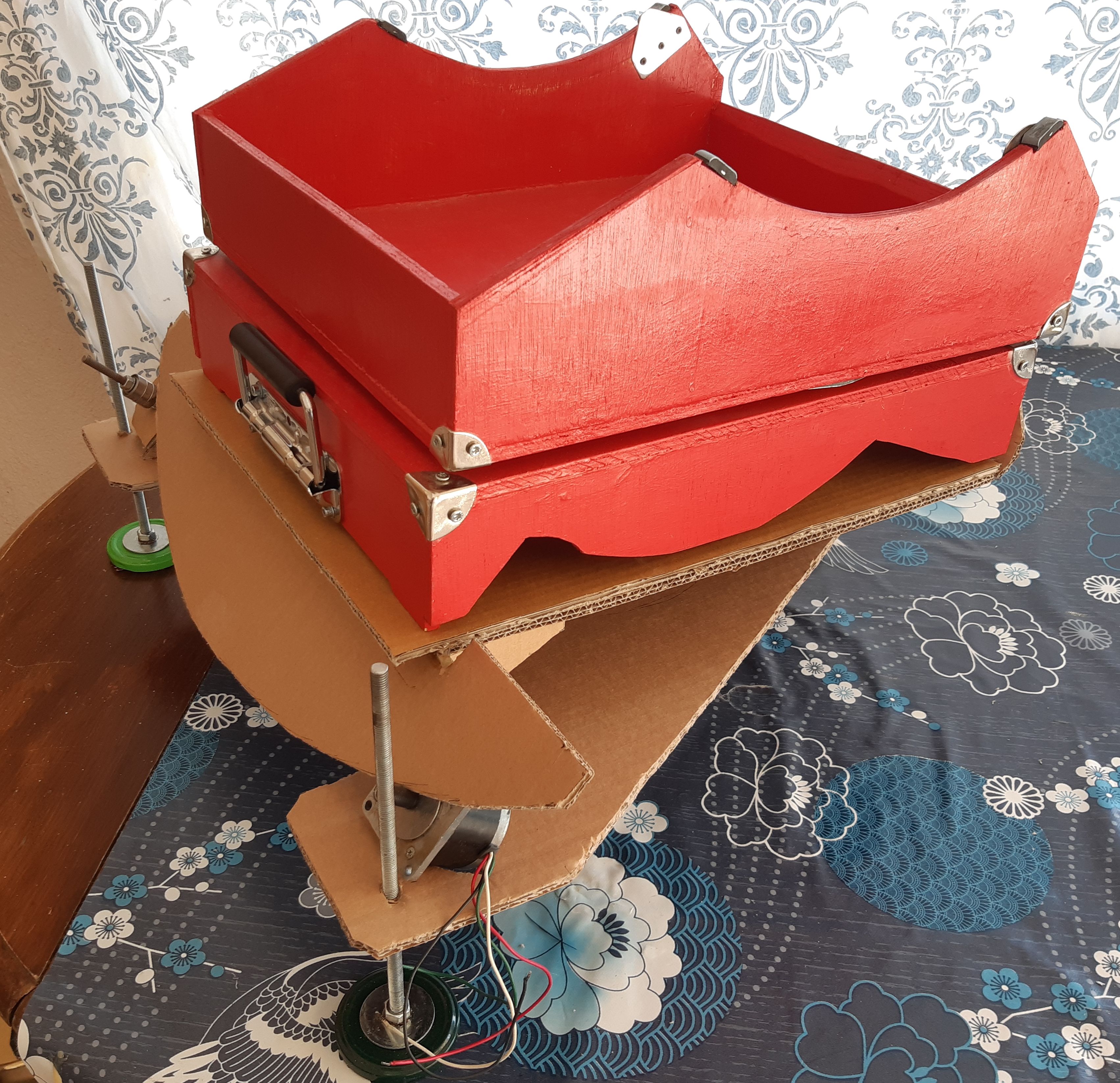
Et enfin, la table avec la base du télescope Strock 250
posée dessus (pas sûr que la maquette en carton supporte le poids du télescope Strock 250
complet)
Finalement, contrairement à la photo
ci-dessous et suite aux conseils de Yannick, nous allons monter la
partie mobile directement sur le plateau de la table pour gagner en
stabilité
.
Réalisation
de la table en CTP de 12 :
La
base en CTP de 12 renforcée en cours de séchage. Il manque encore le
support de l'axe Est et le support du moteur pas à pas à l'Ouest : ils
seront positionnés exactement quand le secteur sera posé sur la partie
mobile (et la base est lasurée mais pas encore peinte). Il est probable
que les tiges filetées seront recoupées :

.
La partie mobile en CTP de 12, sans le
secteur (avec le trou pour laisser passer la tige filetée du pied Sud :

.
Le secteur en CTP de 12, découpé en partie,
et avec une lame en aluminium de 15x2 collée Araldite sur la tranche :

.
La base du télescope posée provisoirement sur
la table :

.
La base de la table à peu près terminée avec
les roulements à billes à l'Est. (Il manque surtout le moteur pas à pas et
son support à l'Ouest) :

.
La base avec la partie mobile posée sur la
base (il manque une sécurité pour éviter de soulever la partie mobile côté
Sud et d'arracher l'axe côté Nord) :

.
Et la base du télescope posé dessus :

.
Nous avons réalisé le boîtier du moteur pas à
pas (42x42x28 axe d5x21) (en CTP et aluminium) vissé avec une plaque en
alu sur la base pour pouvoir le changer et régler plus facilement.
Nous avons muni l'axe du moteur d'un pignon
alu pour courroie crantée modifié (les flasques ont été supprimés, les
creux remplis d'Araldite et le tout entouré d'une gaine thermorétractable
: D total : 16.
Sur la photo : de gauche à droite :
- Le support Ouest avec 2 roulements à
billes
- Une vis sur le secteur qui sert de butée
Ouest
- Une vis sur la base qui sert à la fois de
butée pour ne pas soulever la partie mobile et arracher l'axe Sud et
aussi comme appui pour les butées
- Une vis sur le secteur qui sert de butée
Est
- La plaque en alu, vissée sur la base et
qui maintient le support moteur
- Le moteur pas à pas et son pignon
alu avec une gaine thermorétractable noire (Le moteur est monté
légèrement en biais pour aligner parfaitement son axe avec celui de la
table)

.
La bonne nouvelle, c'est qu'avec ce moteur et
ce diamètre, on peut facilement faire basculer manuellement le télescope,
moteur déconnecté : il n'y a pas besoin de pédale ou de levier pour
décoller le secteur du moteur !
Un simple interrupteur bipolaire suffit : en
basculant l'interrupteur, on ouvre électriquement les 2 bobines du moteur,
on remet manuellement le télescope vers l'Est, on rebascule l'interrupteur
et c'est reparti pour 45 mn.
Photo (provisoire) de la table équatoriale
(le moteur n'est pas encore connecté) avec le télescope Strock
250 posé dessus :

.
La table équatoriale à peu près terminée
(avec des petits morceaux d'adhésifs phosphorescents dans les coins et les
angles) :
- à droite : L'interrupteur pour débrayer le
moteur pas à pas (commandé à la main ou au pied
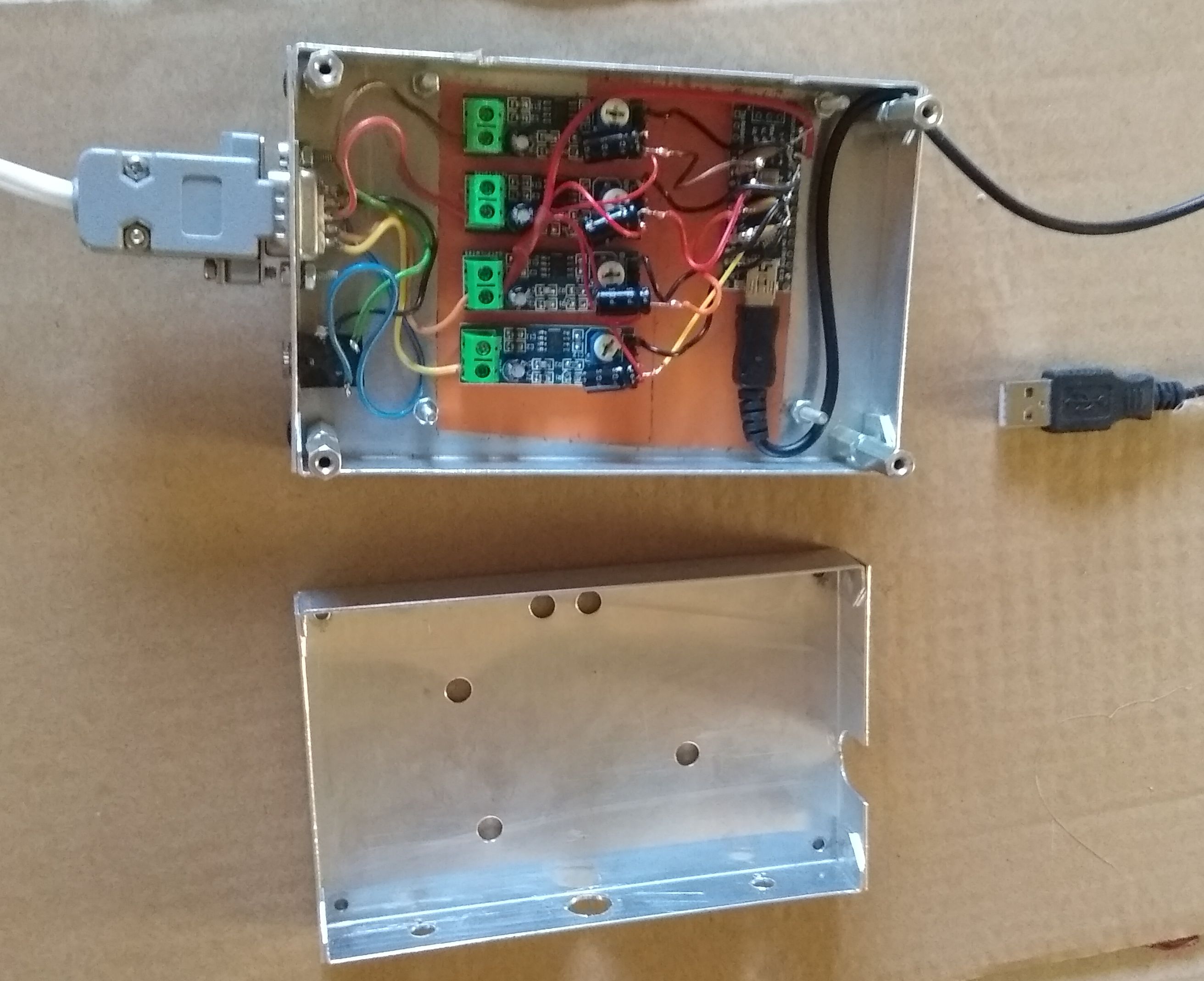
- Derrière, pas très visible : le boîtier
électronique en tôle, relié à l'interrupteur par un connecteur SUBD 9
broches et muni, de l'autre côté, d'un câble USB pour l'alimentation et
la programmation
- Au milieu, la vis M4 verticale avec 2
écrous et rondelle, qui sert à 3 choses :
- butée pour éviter de soulever la partie
mobile (et arracher l'axe Sud !)
- butée fin de course Est et Ouest du
secteur
- maintenir une petite pièce de CTP
(pas très visible) : en faisant pivoter cette pièce, on soulève le
secteur qui n'est plus en appui sur les roulements ou le galet
moteur (éviter les plats...). Ce qui permet aussi d'observer sans
mettre la table en route. (Arrêter simplement le moteur avec
l'interrupteur ou en le débranchant, libère le moteur pas à pas et
le secteur se "promène" quand on pointe le télescope).

.
Nous avons fait les premiers essais avec le
télescope, de nuit : ça fonctionne bien. La mise en station était
approximative et nous avons ajusté la tempo PWM du microprocesseur
Arduino Nano de l'électronique (4736 µs).
Nous pensions mettre un (faible voyant) quand
le moteur tourne mais c'est inutile : on entend (faiblement) "chanter" le
moteur (PWM) quand il tourne...
De butée à butée, il faut un peu plus de 1h
10mn ce qui largement suffisant.
Après un réglage approché (4736 µs) et
rapide, avec un gros grossissement sur une étoile proche de l'écliptique,
au lieu de perdre un objet centré dans l'oculaire en 30s, il a fallu 1/4h.
Nous faisons les ajustements de vitesse
précis, de jour, au soleil, (avec le cache miroir en place :-), en posant
une feuille de papier sur le cache miroir, en attachant un objet près du
secondaire, en dessinant l'ombre de l'objet et en notant l'heure sur cette
ombre sur la feuille. Puis au bout d'une heure on redessine la nouvelle
ombre et l'heure. On arrête le moteur en lançant un chrono jusqu'à ce que
l'ombre revienne sur la position initiale si le moteur est trop rapide ou
en effectuant la même distance s'il est trop lent. Il n'y a plus qu'à
faire une règle de trois avec les inverses pour déterminer la nouvelle
temporisation en µs) Actuellement : 4457 µs).
Il faut maintenant peaufiner la mise en
station : boussole et niveau à bulle ? Laser pointé sur la polaire ? Les
deux ? Autre chose ?
Encore une fois, électronique à
microprocesseur et moteur pas à pas, au départ, c'est un peu plus long à
régler mais après, ça ne bouge plus.
A noter que si on utilise
un moteur pas à pas avec un réducteur :
- Prix un peu plus élevé
- Un couple très robuste (centre de gravité trop haut ou trop bas,
vent, pb adhérence sur la poulie d’entraînement...
- Avance plus régulière
- Si on coupe courant, le télescope est maintenu
- Il faut débrayer le moteur pour revenir en butée Est
Si on utilise un
moteur pas à pas directement :
- Prix plus faible
- Il faut s'assurer de la résistance électrique du moteur pour
avoir un couple suffisamment important avec sa tension d'alimentation
- Le centre de gravité doit être à peu près correct, pas trop de
vent et adhérence suffisante de la poulie moteur
- Pour revenir en butée Est, il suffit de couper le moteur (plus
facile et plus simple)
- Pour utiliser le télescope sans moteur, il faut bloquer le
secteur de la table avec une cale...
Le télescope sur la table, prêt à être
utilisé :

- Tout en haut, qui dépasse à
peine de la jupe noire, l'extrémité du tube du laser
de pointage. (il faut faire tourner le tube pour l'allumer)
- Plus bas, le porte-oculaire
à roulements à billes (épatant)
- Les deux leviers noir et rouge
de réglage du primaire
- La pièce de bois, sous le
secteur, est tournée vers l'intérieur, le secteur est donc en appui
dessus et n'appuie donc pratiquement pas sur les roulements et le
galet du moteur
- en bas à gauche, les 2
roulements à billes
- Le secteur à peu près au tiers
de sa course (les graduations noires représentent 10 mn)
- Le support du moteur avec le
moteur pas à pas et son galet (qui, sur la photo, n'est pas en
contact avec le secteur : position veille ou transport)
- Le boîtier
en tôle avec, à gauche, un câble USB (alimentation et
programmation), un interrupteur 2 positions : la vitesse pour notre
115/90 ou la table du Dobson. (En utilisation normale, le boîtier
est situé sur la base et sous la partie mobile de la table. Ses
quatre pieds sont immobilisés dans quatre trous percés dans la base)
- A droite, un connecteur Subd9
relié à l'interrupteur qui permet de découpler le moteur pour
pouvoir le remettre en butée Est
- Et plein de petits morceaux
d'adhésifs phosphorescents, du laser aux angles de la table en
passant par le porte-oculaire, les leviers de réglage... épatant la
nuit
La table seule avec le support du télescope. Nous avons rajouté :
- Une boussole (collée au silicone) sur de
l'adhésif phosphorescent
- Un niveau à bulle (fixé par 2 vis +
ressorts pour le réglage) et avec de l'adhésif phosphorescent
- La pièce de bois sous le secteur,
qui permet de soulever le secteur quand la table n'est pas utilisée ou
si on observe sans faire tourner le moteur, a été agrandie pour
améliorer la stabilité. Ici, elle est en position arrière : elle
soulève le secteur qui n'est donc pas en appui ni sur les deux
roulements à gauche (visibles) ni sur le galet du moteur à droite.
- L'électronique (à peine visible sur
la photo, l'adaptateur USB et le câble qui alimente l'électronique)
est à sa place (à l'abri) : sur la base, sous la partie mobile
- Une pièce de tôle à oreille sertie
et collée sur l'écrou de blocage du pied Sud : ce système permet de
débloquer et de régler la hauteur du pied Sud (jusqu'à ce que le
niveau indique une position correcte) sans outil.

.
Enfin, un ciel convenable... après avoir
réglé (en une minute) le primaire grâce à notre mire
à Led, pointé une étoile "proche" de l'écliptique (Arcturus),
retouché un peu la temporisation (4350 µs)
et la hauteur du pied Sud.
Depuis la terrasse : observation de M13,
juste pour le plaisir et voir si le télescope est bien réglé.
(Quand, il est visible, M13 est le premier objet que je regarde pour
tester un télescope :-)
Un tour par la nébuleuse de la
Lyre : on peut grossir et regarder pendant plusieurs minutes : le
télescope suit parfaitement.
Un dernier (long) coup d’œil à M51, les
deux noyaux sont évidents et on perçoit bien les branches spirales.
Photo d'illustration de M51 (dans le 250 c'est quand même un peu moins bon
que sur cette photo :-)

Mise en station pour régler la boussole et le niveau à bulle :
- Mise en station approximative...
- Secteur en butée Est
- Pointer la Polaire, ou mieux : 0.5° de la
polaire en direction de Dubhe (le bec de la casserole)
- Faire tourner le secteur manuellement vers
l'Ouest, observer le déplacement de la Polaire :
- Montée : déplacer le pied Sud vers
l'Ouest
- Descente : déplacer pied Sud vers l'Est
- Ouest : abaisser le pied Sud
- Est : remonter le pied Sud
- Régler (vis) niveau à bulle
- Caler le curseur de la boussole
Suite au montage du kit EZ PUSH TO
sur notre télescope, nous avons besoin de bloquer la table
équatoriale pendant le réglage des "offsets" du kit EZ PUSH TO.
Nous avons donc remplacé l'interrupteur poussoir Marche/arrêt de la table
équatoriale : Suivi/libre.
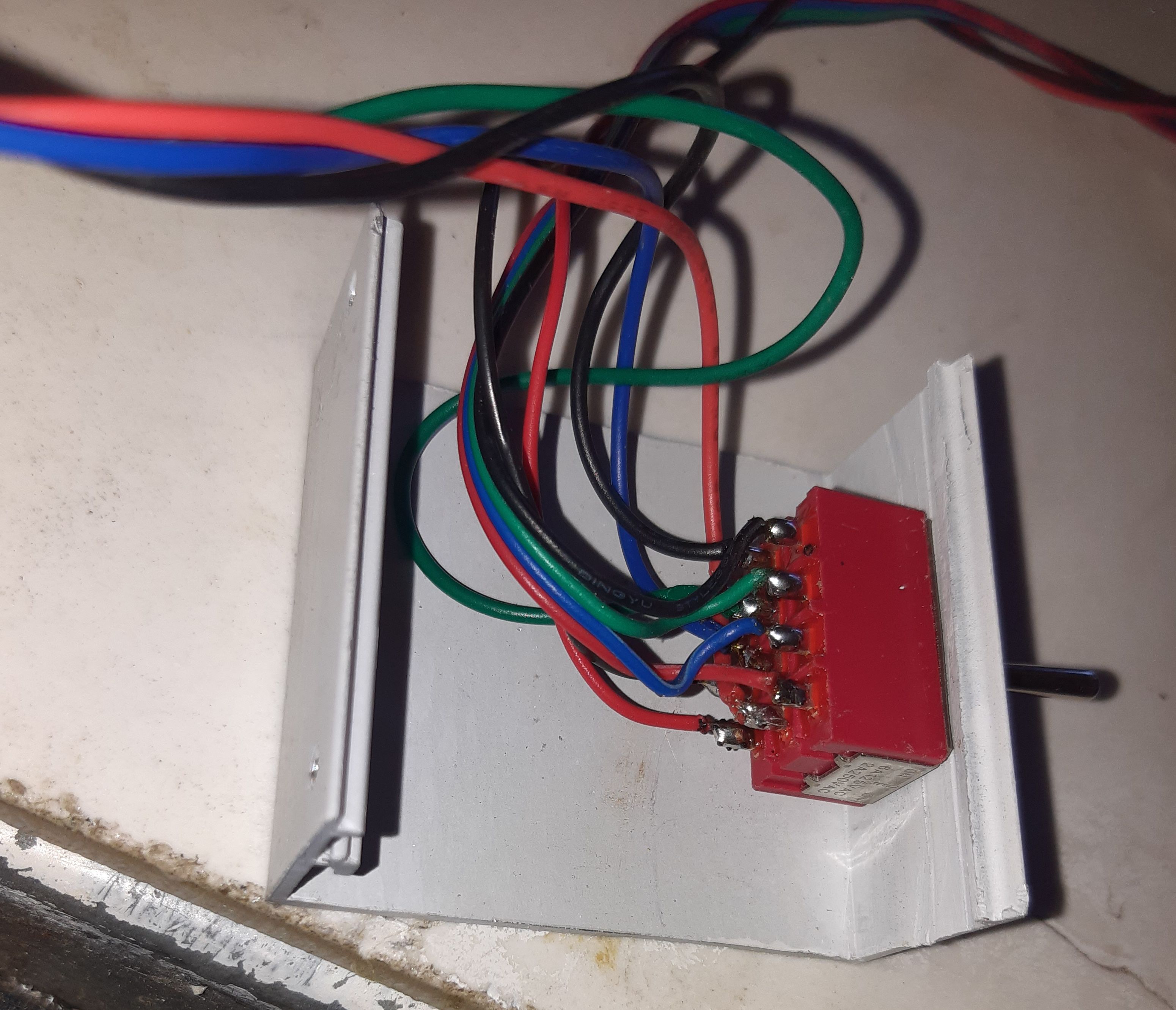
Par un interrupteur à levier 3 positions, 4 circuits :

Chacun des 4 fils du moteur pas à pas est relié à un des 4 contacts du
milieu de l'interrupteur.
Les 4 contacts du côté "Suivi" sont reliés aux 4 fils de l'électronique de
commande.
2 des quatre contacts du côté "Bloqué" sont reliés à la masse et au 5V.
(Si le blocage n'est pas suffisant, nous réunirons aussi les 2 autres)
- à droite : "Suivi" : environ 250 mA
- au milieu : "Libre" : environ 20 mA (électronique seule)
- à gauche : "Bloqué" (une ou deux bobines reliée(s) au 5V) environ 400
ou 800 mA. (Nous verrons si relier une bobine au 5V est suffisant pour
maintenir correctement la table bloquée)
.
Au milieu pour revenir pile au
centre
A gauche pour bloquer la table et
rechercher l'objet à observer avec le EZ PUSH TO kit.
A droite : "Suivi" la table suit
l'objet pendant maximum 35 mn (et EZ
PUSH TO n'affiche plus la position
correcte)
Pour un nouvel objet, on recommence :
Au milieu pour revenir pile au centre... (et EZ
PUSH TO affiche de nouveau la
position cor
Vue de l'interrupteur en position "Suivi" : (avec, comme d'habitude, un
adhésif phosphorescent pour le repérer facilement dans la nuit...)

.
L'observation de nuit a montré que le système de blocage du moteur marche
bien (une seule bobine connectée suffit). Il ne manque plus qu'une chose
(prévue) : l'installation d'un niveau à bulle 2 axes fixé sur le rocker
pour régler le rocker parfaitement à l'horizontale.
Nous avons trouvé une idée pour une butée amovible, réglable et sans jeu
pour positionner la table pile toujours au même endroit à mi-course : une
cale en bois articulée autour d"un axe vertical (tige filetée M5 +
rondelles et écrous) sur la base de la table, poussée par une vis +
ressort fixée à une équerre en aluminium avec un écrou M5 collé Araldite.
En utilisation normale, la cale est en butée sur la vis et arrête la table
pile au milieu. A partir de là, la course est d'environ 35 mn.
Si on pousse la table vers l'Est et que l'on dégage la cale en bois vers
l'arrière, la table peut de nouveau avoir une course entière d'un peu plus
d'une heure.
Sur la photo, la cale est vers l'avant, en position butée à mi-course et
en appui sur la vis (vis en inox à cause la boussole). Un renfort de la
partie mobile vient en butée Est sur la cale.
Si on fait pivoter la cale vers l'arrière, le renfort passe librement au
dessus de la cornière aluminium et la table reprend toute sa course.
Il ne reste plus qu'à régler correctement la vis pour que l'axe de
l'azimut soit parfaitement vertical...

.
Nous avons rajouté un niveau à bulle deux axes fixé sur la partie
mobile pour pouvoir la mettre à l'horizontal avant de lancer les
offsets du EZ PUSH TO kit.
Epatant ce petit niveau:
il coûte 6€, il a une équerre de fixation et ses 3 vis permettent de le
régler dans les deux axes.


http://spt06.perso.libertysurf.fr
Commencé
le
16/04/2022

A jour au 28/06/2022