Sciences pour tous vous propose des réalisations en électronique, optique, astronomie...
Motorisation d'une monture équatoriale EQ2
(Difficulté : *** moyen)
Ce projet consiste à motoriser progressivement une monture équatoriale EQ2 :
Dans la 1ère partie, nous ajoutons un moteur pas à pas et un réducteur au mouvement d'ascension pour suivre (pour une observation visuelle) un objet dans le ciel, une fois la monture mise en station, malgré la rotation terrestre.
Dans la 2ème partie, nous allons modifier l'électronique du moteur pas à pas pour, avec 2 touches supplémentaires, produire un mouvement d'ascension rapide progressif dans les deux sens.
Dans la 3ème partie, nous allons rajouter un moteur pas à pas muni d'un réducteur au mouvement de déclinaison et avec encore 2 touches supplémentaires, produire un mouvement de déclinaison rapide progressif dans les deux sens.
Dans la 4ème partie, nous allons ajouter un afficheur avec les coordonnées d'ascension et de déclinaison du télescope, ce qui permet, en consultant une table des coordonnées, de pointer n'importe quel objet.
Dans la 5ème partie nous allons essayer de réaliser un vrai "Goto" : en faisant défiler une liste d'objets : Lune, planètes, Messier... le télescope pointe l'objet sélectionné.
Avec notre projet, on peut s'arrêter à n'importe quelle étape : par exemple, se contenter du mouvement de suivi.
1ère partie : mouvement de poursuite pour une monture équatoriale
Nous avons un petit 115 sur une monture équatoriale EQ2 classique.
Nous souhaitons construire un mouvement de poursuite.
Nous proposons ici une réalisation basée sur une carte Arduino Nano (à 4€), un peu d'électronique et un moteur pas à pas pour avoir un mouvement stable et précis.
L'inconvénient des moteurs pas à pas, ce sont les secousses et les vibrations.
Ici, nous le pilotons en vrai PWM sinus : plus de secousses, plus de vibrations.
En plus, nous ne modifions pas la monture et la mécanique est très simple (la réalisation mécanique nous a pris 1h30).
Mécanique :
Pour adapter un mouvement de poursuite du commerce, la monture est munie sur sa base d'origine, de deux trous filetés un M6 et un M8.
Il faut dévisser le système de blocage et l'axe et mettre en place une tige filetée M6 L~100 et une tige filetée M8 L~100.
Nous avons fixé un engrenage sur la couronne de suivi standard.
Nous avons récupéré un moteur pas à pas 6 fils (utilisé ici en 4 fils, les deux autres sont non connectés), nous avons agrandi un des trous de fixation du moteur à 6 et meulé la carcasse pour le passage de l'écrou.
La tige M6 reçoit, dans l'ordre : rondelle, écrou, écrou, écrou, rondelle, moteur, rondelle, rondelle à dents, écrou, écrou. Les contre écrous permettent de régler précisément le jeu pour que le moteur pivote sur sa tige sans jeu pour accoupler ou désaccoupler.
On récupère un disque plastique D28 (ici un engrenage, sur lequel on découpe un méplat : en faisant tourner ce disque, on pourra maintenir le pignon du moteur contre l'engrenage (accouplé) ou écarté (désaccouplé).
La tige M8 reçoit : rondelle, écrou, écrou, écrou rondelle, disque plastique à méplat, rondelle, écrou, écrou. Les contre écrous permettent de régler précisément le jeu pour que le disque pivote sur sa tige pour accoupler ou désaccoupler.
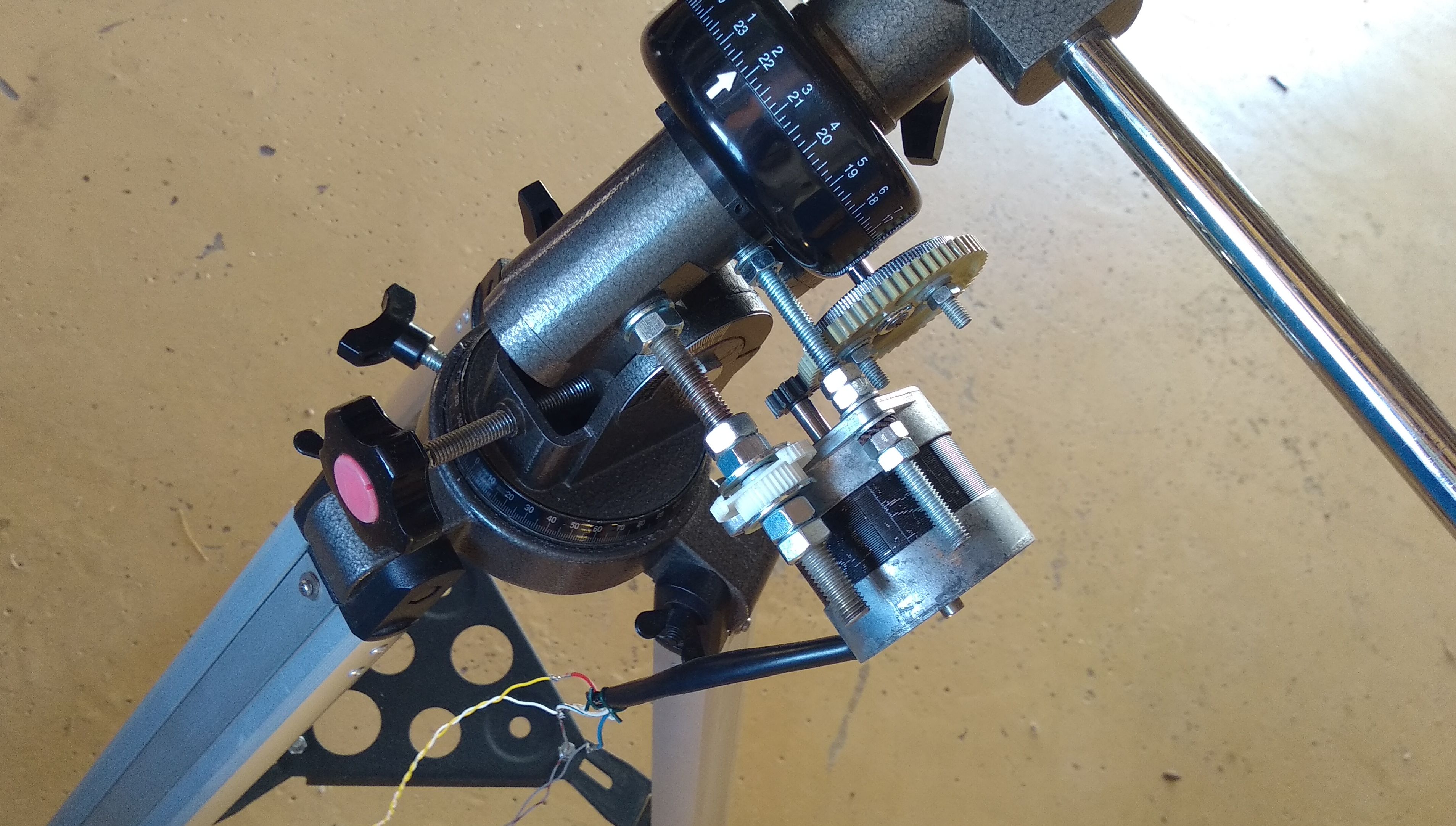
Vue de la monture en position désaccouplée : le plat du disque est orienté vers le moteur :
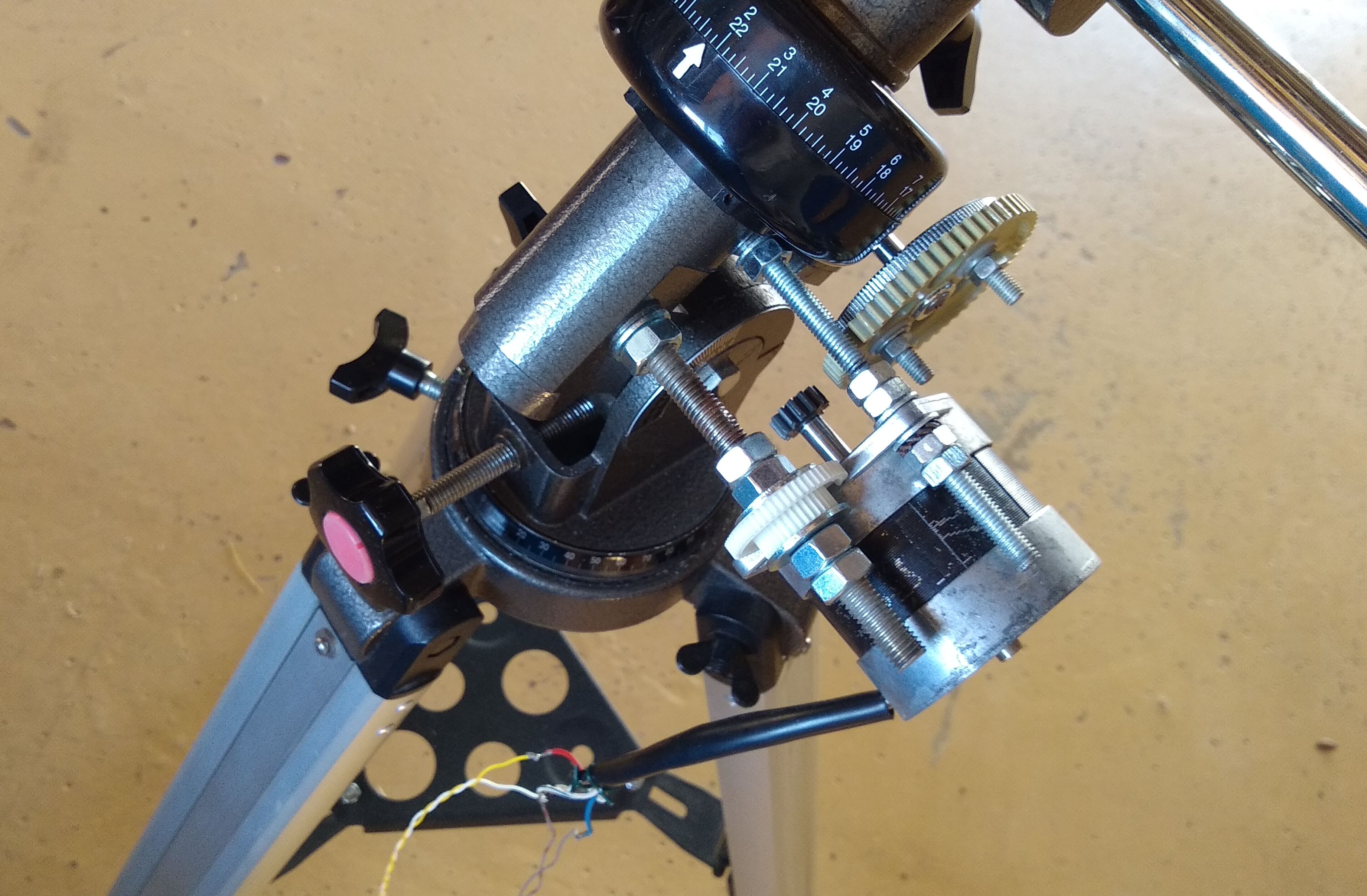
Vue de la monture en position accouplée : le plat du disque est orienté à l'opposé du le moteur :
Électronique :
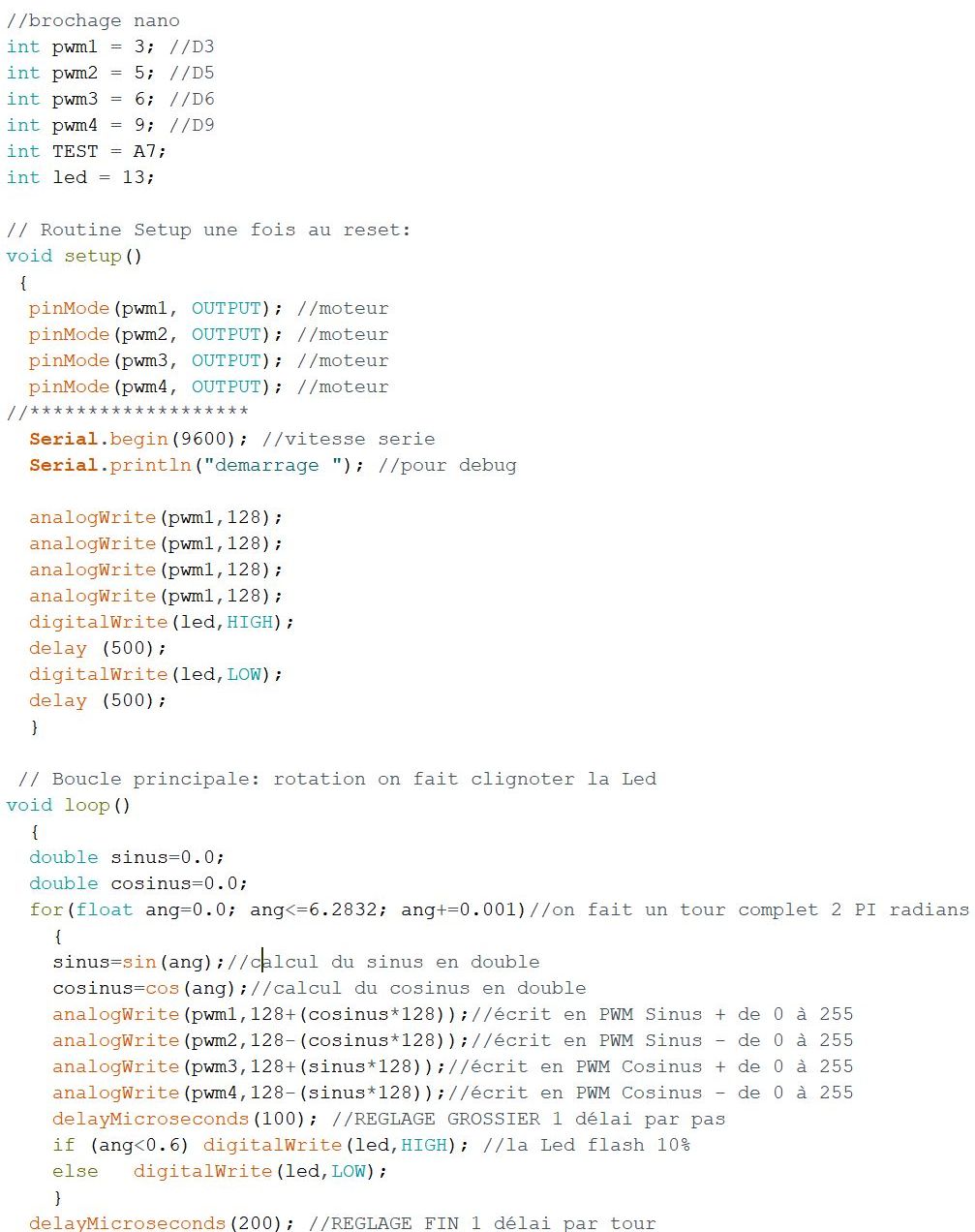
Nous utilisons une carte Arduino Nano. 4 sorties sont utilisées en mode PWM : D3 D5 D6 D9
Un programme adéquat "maison" génère : sinus+ sinus- cosinus+ cosinus- sur D3 D5 D6 D9. On fait clignoter la Led de l'Arduino. On utilise les commandes sin(), cos(), analogWrite().
Chaque sortie est filtrée (R47k + C470n) et reliée à la carte LM386 via un chimique 100uF - coté amplificateur.
Chaque sortie est amplifiée dans une carte LM386 modifiée. (Nous avons court-circuité le condensateur chimique de sortie HP) On trouve ces cartes à 2€ pièce.
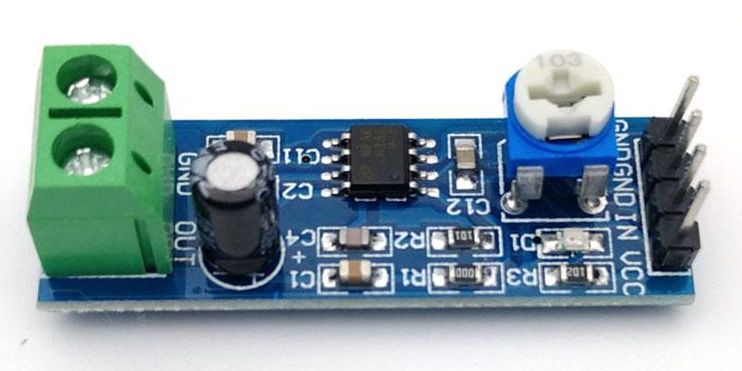
Les LM386 sont alimentés en 5V.
Chaque potentiomètre des cartes LM386 est réglé à la limite de la saturation du sinus.
Les sorties masse de chaque LM386 ne sont pas utilisées.
Les sorties OUT sont reliées : sinus+ et sinus- à une bobine du moteur, cosinus+ et cosinus- à une autre.
Rappelons qu'avec les moteurs 4 fils, il suffit d'inverser une bobine pour inverser le sens de rotation.
Attention
avec cette technique et la puissance limitée de LM386, il faut un moteur
pas à pas d'une résistance entre 4 et 8 ohms (en dessous les LM386
saturent, au-dessus la tension de 5V risque d'être un peu faible pour
alimenter le moteur)
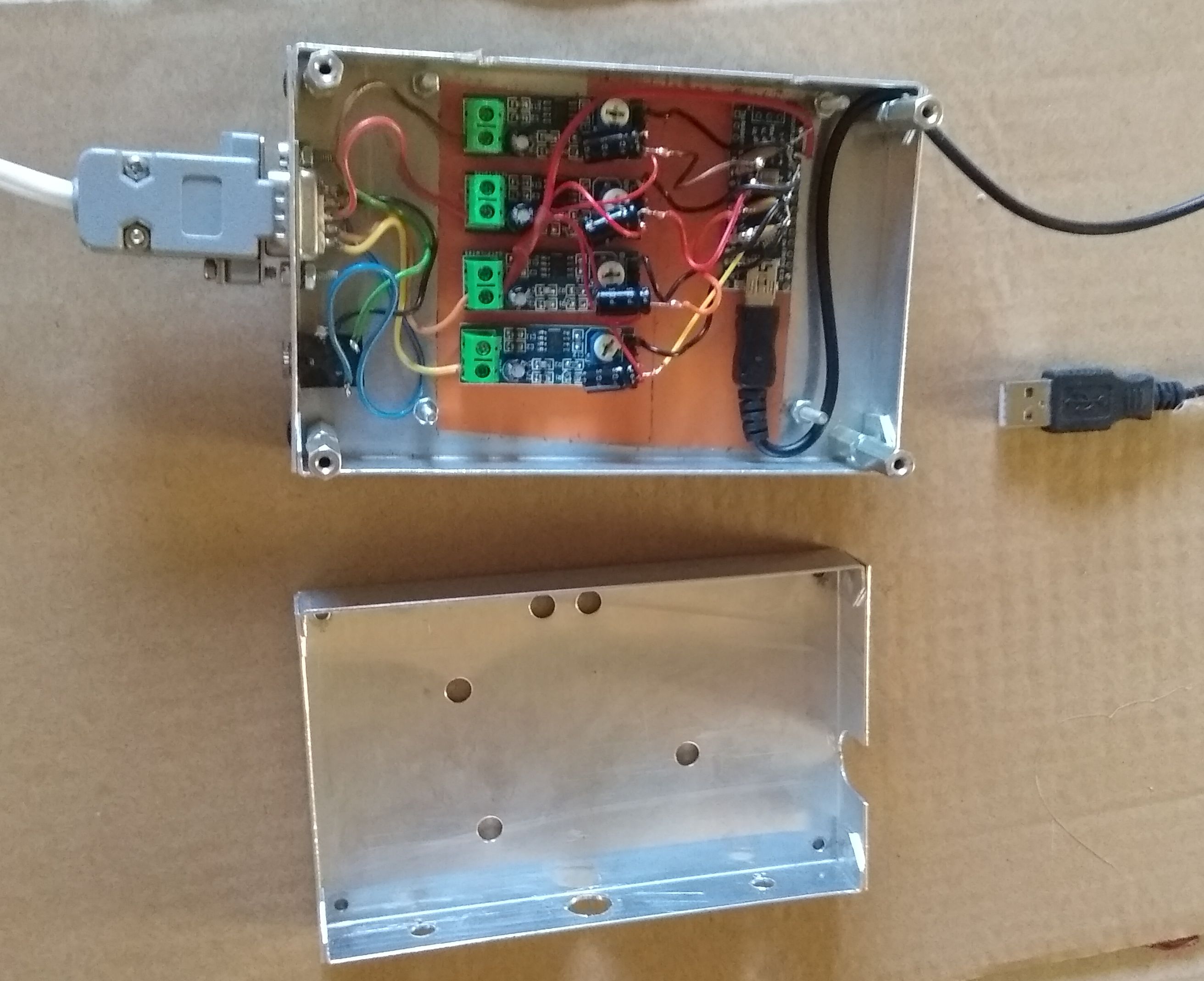
Vue de l'électronique dans son boîtier : un SUBD9 d'un côté pour la connexion moteur et un cordon mini USB - USB de l'autre.
Un oscilloscope, même très sommaire, est quasiment indispensable pour mettre au point le montage et, en particulier, régler les gains des amplificateurs.
l'USB permet d'alimenter la chose avec à peu près n'importe quoi : PC portable, adaptateur secteur, batterie pack, adaptateur allume-cigare 12V...
Notons qu'avec cette électronique, le
moteur pas à pas est alimenté pas des amplificateurs Audio LM386 montés
en pont. le moteur reçoit environ 5 V et le LM386 délivre un peu moins
de 1 A. La vitesse de rotation du moteur est très lente l'inductance
est négligeable. Pour un couple et un rendement maximum, la résistance
du moteur doit être de l'ordre de 5 ohms. Un peu plus de préférence : 7
ohms par exemple.
Ça fonctionne bien : le moteur "chante" faiblement mais pas de vibrations, nous avons ajusté la vitesse de rotation par programme (voir plus loin). Nous ne faisons que du visuel.
L'ensemble est alimenté par des accus Lithium récupérés sur un ancien PC portable et reliés à une carte qui sort du 5V en USB et qui se recharge en micro USB.
Vue de l'ensemble : (Habituellement, le boîtier est fixé sous le triangle du trépied), il est provisoirement alimenté par une batterie Lithium 18650 de récupération. Le petit boîtier USB qui affiche la tension et le courant est très pratique...

Réglage de nuit :
- Mettre le télescope en station (Nous utilisons un laser fixé sur la monture que l'on règle en faisant tourner la monture d'un demi-tour puis nous pointons le laser sur l'étoile polaire)Réglage de jour (Si la monture est graduée. Méthode moins précise mais pratique pour dégrossir) :
- Mettre la monture en ascension sur 0hAméliorations possibles :
- On pourrait rajouter un interrupteur "Lune" pour modifier légèrement la vitesse de rotation.
- On pourrait ajouter 2 touches poussoir pour rotation rapide accélérée dans un sens et dans l'autre (mais il faut rajouter une sortie pour déconnecter les 4 condensateurs C470n des filtres comme dans micropas.) : ce sera l'objet de la 2e partie.
Défauts :
- Pour accoupler le moteur, si le pignon du moteur "ne tombe pas" dans l'engrenage, on est obligé d'attendre quelques secondes ou de forcer un peu, mais ce n'est pas un gros problème...- Les moteurs pas à pas sont stables, précis, indestructibles mais ils consomment : l'ensemble consomme environ 0.4A sous 5V ce qui doit nous faire un peu plus de 5h d'autonomie. Mais selon l'effort fourni, on peut essayer de diminuer le gain de chaque amplificateur pour diminuer la consommation. On peut, par exemple, diminuer le gain juste à la limite de patinage du moteur et multiplier par deux. Sur notre télescope, en diminuant les gains des moteurs (en prenant une bonne marge avant patinage), le moteur est devenu totalement silencieux et l'ensemble consomme 0.18 A sous 5V, ce qui devient raisonnable.
Une astuce bête pour mesurer l'autonomie d'une batterie avec ce système : régler manuellement la position équatoriale de la monture sur 0, brancher et attendre la fin de la batterie et lire l'heure sur la monture.
..
Ça marche...
2ème partie : Ajout de deux boutons poussoirs pour un déplacement rapide et progressif du mouvement d'ascension
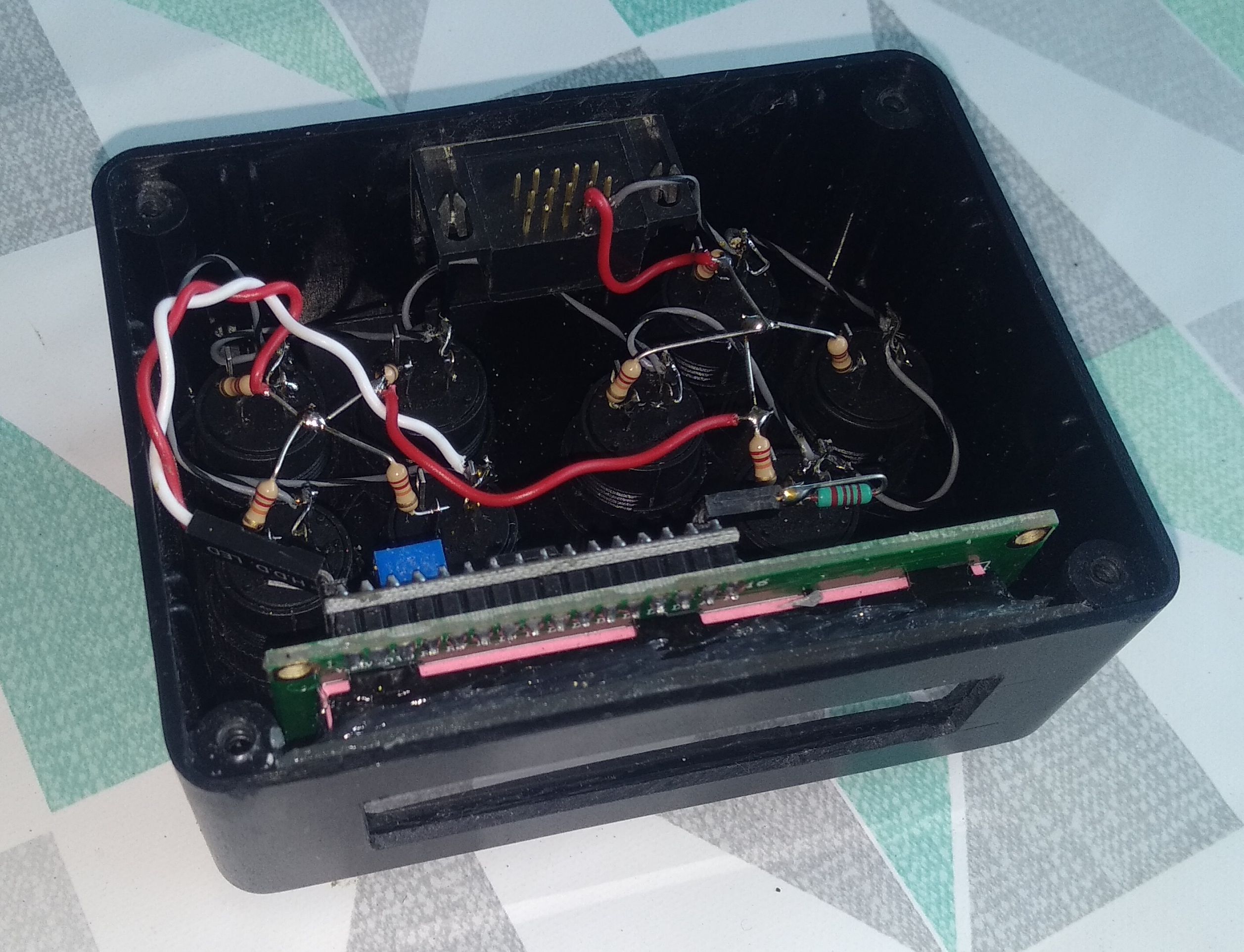
En pensant à l'avenir et en étant optimiste, nous avons réalisé un boîtier de commande : une raquette. A partir d'un coffret en plastique noir PVC, nous avons installé 8 boutons poussoirs lumineux : 4 pour les 2 mouvements et 4 autres pour un menu, défilement... Nous avons rajouté un afficheur LCD I2C 2x16 caractères rétro éclairé et une prise femelle DBH15 3 rangées. La raquette est relié au boîtier processeur par un câble VGA (avec tous ses fils) : des connecteurs économiques (récup), fiables (Dorés) et verrouillables.
La raquette ouverte coté dessous : les alimentations, les Leds, le rétro éclairage et le commun des touches ont été câblés : (La résistance de 2.2k connectée sur le côté de la carte I2C de l'afficheur permet de diminuer l'intensité du rétro éclairage pour qu'il soit compatible "astro" , elle est reliée à un interrupteur pour forcer la luminosité en mode test et réglages (de jour)...
La raquette vue de dessus : les 8 boutons poussoirs et l'afficheur sont (faiblement) éclairés, l'interrupteur n'a pas encore été installé :

.
La raquette dans la main (Pour l'échelle) avec l'interrupteur de réglage de la luminosité du LCD 2x16 normal/astro et avec le cordon VGA :

Il reste à rajouter un connecteur DBH15 femelle au boîtier, à le relier à la carte Nano, et à compléter le programme pour un mouvement, si possible accéléré et décéléré pour l'ascension...
Câblage de la raquette (fil à fil) :
N°
3ème partie : motorisation du mouvement de déclinaison
Nous voulons modifier le moins possible la monture et que l'opération soit réversible.
Nous avons conçu et imprimé en 3D une pièce plastique :
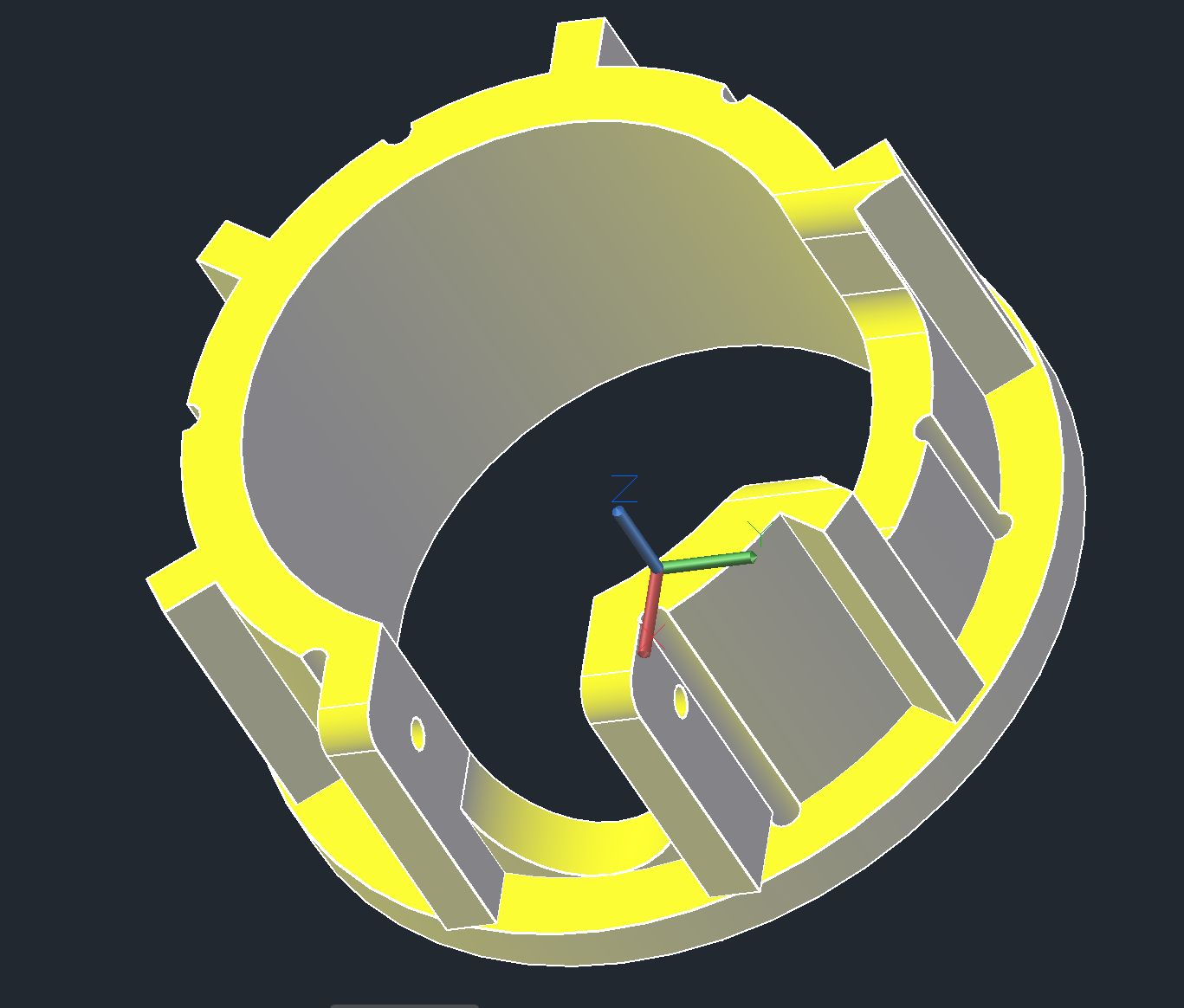
.
Une couronne dentée non modifiée et la même évidée pour la monter sur la monture, la pièce plastique imprimée en 3D, .
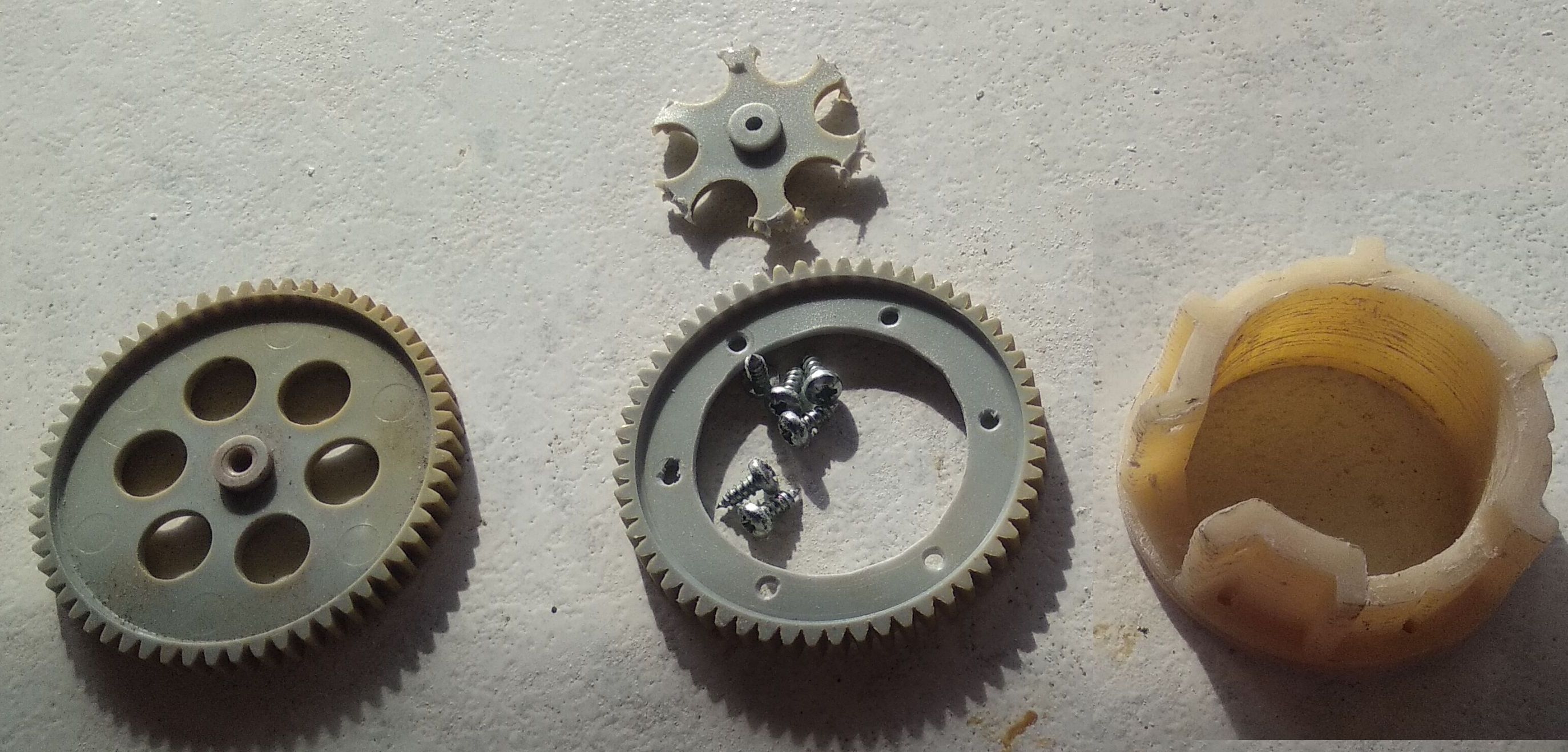
La couronne, fixée par 6 vis sur la pièce plastique montée sur la monture :

Si, comme pour le mouvement d'ascension, nous ajoutons directement un moteur pas à pas couplé à la couronne, le couple demandé sera trop important.
Nous avons donc acheté (pour 25 €) un moteur pas à pas avec réducteur 1/27 intégré :

Ce moteur pas à pas 6 fils (On peut l'utiliser en 4 fils ou en 5 fils, ici : en 4 fils) est bien construit, en métal, avec des roulements à billes et procure un couple important.
Ce moteur sera fixé (pas une tôle) à la monture. Son axe sera muni d'un pignon (avec une pièce d'adaptation), et un système mécanique simple permettra de le désaccoupler.
Nous pensons que le couple et la vitesse maxi conviendront...
Ensuite, l'électronique est modifiée pour y ajouter un connecteur pour le moteur de déclinaison, un connecteur pour les 4 touches de la télécommande, des Mosfets pour piloter le moteur.
Et enfin, on ajoute des lignes au programme pour piloter tout ça (avec une accélération et peut-être une décélération)
La décélération, pour ne pas perdre de pas, n'est indispensable que si l'on affiche les coordonnées et/ou que l'on fait du Goto (étapes supplémentaires).
Pas encore testéThat's All, folks !
Écrivez-nous :

http://spt06.perso.libertysurf.fr