Sciences pour tous vous propose des réalisations en électronique, optique, astronomie...
Gestion de moteur pas à pas 2 axes dont 1 à micropas pour suivi équatorial avec une EPROM
(difficulté : *** moyen)
(Lisez d'abord la page gestion de moteur à micropas 1 axe)
Maintenant que nous avons réalisé une gestion de moteur à micropas 1 axe pour monture équatoriale, voici la description d'une gestion de moteur pas à pas 2 axes dont un à micropas pour monture équatoriale : micropas en suivi et vitesse rapide 2 sens sur l'équateur et vitesse rapide 2 sens sur la déclinaison.
Pourquoi une EPROM ? pourquoi pas un microcontrôleur comme un PIC ? Une EPROM est un composant économique, facile à se procurer et à programmer mais surtout, l'élaboration d'un programme qui gère 2 axes simultanément ou en PWM sur un PIC n'est pas évidente pour l'amateur, les problèmes de timing ne sont pas simples et il faut utiliser un microcontrôleur relativement puissant. Avec une EPROM, pas de problème de timing, les bugs sont limités et les blocs sont indépendants ce qui facilite grandement la mise au point.
On utilise le même montage que pour la gestion de moteur à micropas 1 axe mais les 4 entrées d'adresse haute A15, A16, A17, A18 non utilisées sont reliées aux 4 commandes de la raquette. Les sortie Q0 et Q1 commandent, comme pour la gestion de moteur à micropas 1 axe, le moteur pas à pas Équateur. Les sortie Q2 et Q3 commandent le moteur pas à pas Déclinaison, la sortie Q4 commande la remise à zéro des compteurs. La sortie Q5 commande 2 transistors qui commutent les capacités de filtrage EQ : on filtre le PWM pour avoir du sinus en poursuite mais on de doit pas filtrer en avance rapide. Les 2 autres sorties de l'EPROM Q6, Q7 sont inutilisées.
Schéma :
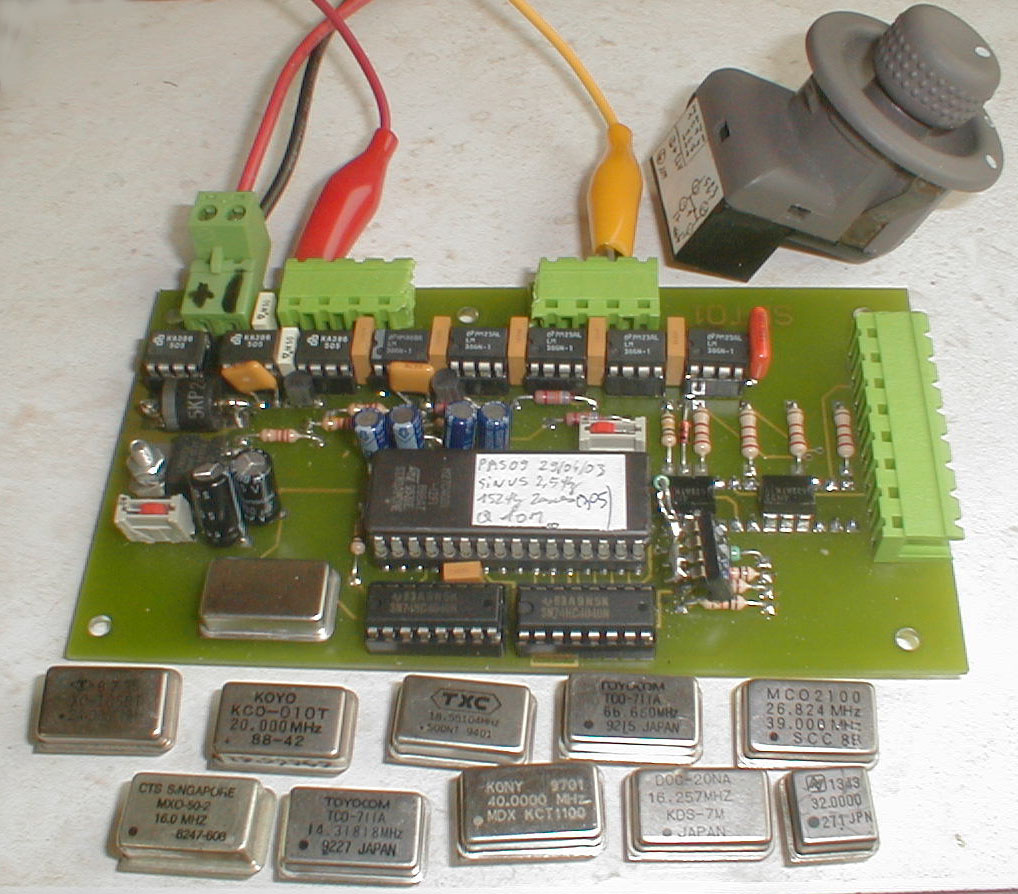
L'ensemble fonctionne sous 12V (de 8 à 18V avec des LM386-N4), la diode D1 prévient les inversions de batterie, Les condensateurs C5 et C9 filtrent le PWM quand ils sont commutés par Q1 et Q2. S2 permet le passage du top synchro en poursuite. Les 4 optocoupleurs 4N25, 4N36... (en option) permettent d'isoler le système de commande raquette, relais, ordinateur...) ici une raquette 2 fois 2 axes Renault conçue pour régler les rétroviseurs. La consommation totale de la carte, sans les moteurs, est d'environ 50 mA.
L'oscillateur à quartz doit être choisi en fonction de la vitesse de poursuite. (Ici 10 MHz) :
5 MHz pour
une vitesse de poursuite de 0.63 Hz à 1.25 Hz
10 MHz pour une vitesse de poursuite de 1.25 Hz à 2.5 Hz
20 MHz pour une vitesse de poursuite de 2.5 Hz à 5 Hz
40 MHz pour une vitesse de poursuite de plus de 5 Hz
Ou toute autre valeur en appliquant une règle de trois (on trouve facilement des oscillateurs à quartz dans des PC au rebut)
La vitesse exacte est réglé finement et précisément par programmation de l'EPROM (la position du pulse Q4) : Nous avons développé un petit programme PC qui génère le fichier EPROM en fonction de la fréquence du quartz et de poursuite.
Réalisation :
Un oscillateur à quartz de 1 à 40 MHz de valeur quelconque (mais stable) est relié à l'entrée Clock d'un premier compteur 12 étages 4040, sa dernière sortie est reliée à l'entrée Clock d'un 2e compteur identique.
On dispose ainsi de toute une gamme de fréquences dans un rapport 2 : par exemple : 1 MHz, 500 kHz, 250 kHz,....
Photo d'une carte 2 axes :
Il faut une EPROM: 4 M : 512 k x 8 : 19 fils d'adresses de A0 à A18 et 8 fils de données : Q0 à Q7
On utilise seulement 6 sorties de l'EPROM : (Q0 à Q4 pour commander 2 moteurs)
Q0 fournit les PWM sinus Équateur : 0 0 0 0 1 0 0 1 0 0 1 0 1 0 1 0 1 1 0 1 1... ou la vitesse rapide
Q1 fournit les PWM cosinus Équateur ou la vitesse rapide
Q2 fournit la vitesse rapide Déclinaison
Q3 fournit la vitesse rapide Déclinaison
Q4 fournit le signal de reset qui remet les compteurs à zéro pour le suivi ou la vitesse rapide. Cette astuce permet de régler finement la vitesse de suivi avec une grande précision:
Q5 fournit la commande filtrage PWM en poursuite PWM uniquement
Q6 et Q7 sont inutilisées
Les sortie Q0 et Q1 (filtrées en PWM) sont appliquées via 2 LM386-N4 au moteur pas à pas Équateur.
Les Q2 et Q3 sont appliquées (sans filtrage) via 2 LM386-N4 au moteur pas à pas Déclinaison.
Réalisation d'une raquette de commande complète:
Ainsi, les 4 adresses les plus hautes de l'EPROM A15, A16, A17, A18 sont reliées aux 4 commutateurs de la raquette (le commun des commutateurs est relié au +5V et les 4 contacts à la masse via 4 résistances de 10 k). Les avances rapide Équateur et Déclinaison peuvent marcher en MÊME temps (ce qui n'est pas si évident à faire avec un microcontrôleur)
A15 : commutateur Équateur Avant
A16 : commutateur Équateur Arrière
A17 : commutateur Déclinaison Avant
A18 : commutateur Déclinaison Arrière
Les sortie Q0 et Q1 commandent le moteur Équateur
Les sortie Q2 et Q3 commandent le moteur Déclinaison
La sortie Q4 est reliée à la remise a zéro des compteurs pour un réglage précis de la vitesse de poursuite.
(NOTA : l'ajustement de la vitesse de poursuite nécessite la reprogrammation de l'EPROM...). Nous avons développé un petit programme sous PC DOS qui produit le fichier EPROM en fonction du quartz, de la vitesse de poursuite et de la vitesse rapide choisis.
Combinaisons:
A18, A17, A16, A15
0000 : poursuite Équatoriale en micropas 1,25 Hz (par exemple)
0001 : Équateur Avant : 152 Hz (par exemple)
0010 : Équateur Arrière : 152 Hz
0011 : Équateur Avant : 152 Hz (par exemple)
0100 : Déclinaison Avant 152 Hz
0101 : Déclinaison Avant 152 Hz + Équateur Avant 152 Hz
0110 : Déclinaison Avant 152 Hz + Équateur Arrière 152 Hz
0111 : Déclinaison Avant 152 Hz + Équateur Avant 152 Hz
1000 : Déclinaison Arrière 152 Hz
1001 : Déclinaison Arrière 152 Hz + Équateur avant 152 Hz
1010 : Déclinaison Arrière 152 Hz + Équateur Arrière 152 Hz
1011 : Déclinaison Arrière 152 Hz + Équateur avant 152 Hz
1100 : Déclinaison Arrière 152 Hz
1101 : Équateur Avant: 152 Hz
1110 : Équateur Arrière 152 Hz
1111 : Déclinaison Avant 152 Hz + Équateur Avant 152 Hz
(Les combinaisons en italique sont en principe interdites)
La carte de commande rentre dans un boîtier de raquette.
NOTA : en récupérant l'adresse A14 (et en perdant un facteur 2 en résolution), on peut rajouter un bouton lent/rapide pour la raquette : rapide pour le déplacement et lent pour le pointage précis. Nous avons réalisé un boîtier de commande 9.5 Hz/152 Hz.
Principaux composants
| Composants | Prix Euros Ht | |
| Oscillateur quartz 20MHz | QO20 | 0.77 |
| diode | 1N5402 | 0.13 |
| optocoupleur | 4N36 | 0.49 |
| transistor NPN | BC237 | 0.10 |
| ampli BF LM386 | 386 | 0.28 (/10) |
| régulateur 5V | 7805 | 0.34 |
| compteur HC4040 | 74HC4040 | 0.46 |
| support ci 2x8 | SUP8 | 0.15 |
| support ci 2x20 | SUP20 | 0.26 |
Pour moins de 10 (sans les moteurs ni le commutateur), on peut réaliser la carte... si on utilise un simple commutateur pour la raquette, on peut faire l'économie des optocoupleurs (indispensables pour relier la carte à, par exemple un vieux port LPT de PC)
That's All, folks !
Des commentaire ? Écrivez-nous :

http://spt06.perso.libertysurf.fr